
The use of Inertial Measurement Unit (IMU) to detect motion artifacts
During the last years, Near-Infrared Spectroscopy is increasingly used for measuring brain and muscle activity during experiments and studies that involve movement – for instance in rehabilitation, sports or pediatric research. Therefore, in case of certain experimental set-ups, detection and removal of motion artifacts to improve data quality is crucial.
Near-Infrared Spectroscopy (NIRS) non-invasively measures concentration changes of oxygenated and deoxygenated hemoglobin in local tissue. NIRS is often portable and relatively insensitive to motion artifacts in comparison to other monitoring techniques, for instance EEG, and hence is often used in studies that include movement in different research areas, such as psychology, sports sciences or geriatrics. Although the technology of NIRS improved significantly during the last years, head and sensor movement can still cause motion artifacts shown in the data as spikes at a high frequency. To obtain hemodynamic measures and correct data analysis, it is necessary to detect and remove these motion artifacts.
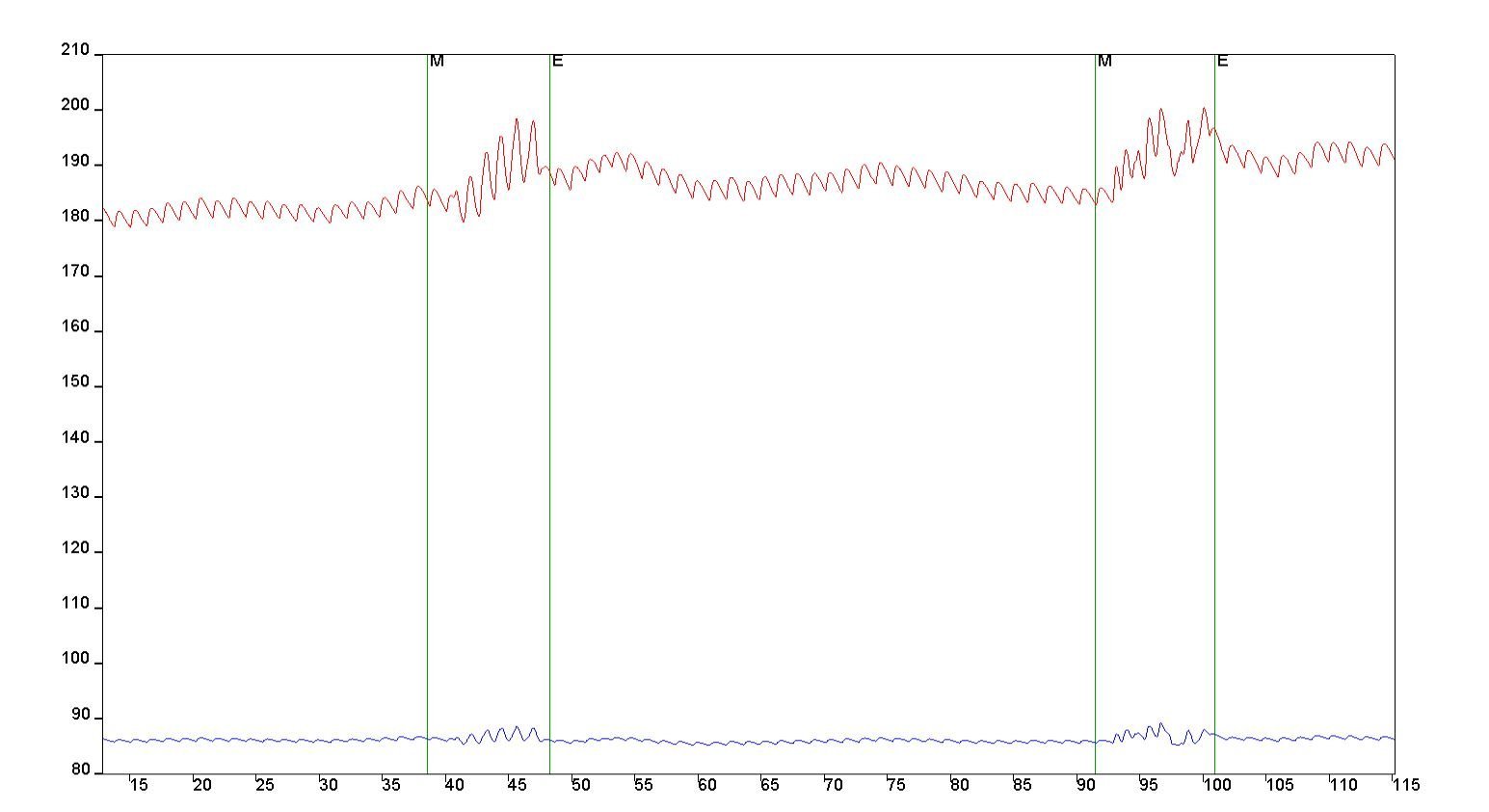
Figure 1: Movement artifacts in NIRS signals shown in OxySoft. Event “M” marks beginning of head movement, event “E” marks end of head movement.
Presence of movement artifacts can be derived from NIRS-data only, or for example, from co/registered video recording. With addition of inertial measurement unit (IMU) data the detection of motion artifacts can be better estimated. An IMU integration allows seamless simultaneous recording of motion data together with the NIRS-data, which results in better movement artifact detection [1]. Subsequently, movement artefacts can be either excluded from the dataset or filtered [2]. The gyroscope measures rotation around the axis in degrees per second and is, therefore, useful to measure rotational movement.
Two of our devices are built-in with motion sensor: the Brite offers IMU as standard feature, the PortaLite MKII as an add-on.
PortaLite MKII
The PortaLite MKII sensor includes a 6-axis IMU, which consist of an accelerometer and a gyroscope. There is no need for recalibration of the IMU before starting a measurement, as this is done before delivery of the device.

Figure 2: Exact configuration of the IMU and its axis in the PortaLite MKII sensor
The gyroscope acquires rotation around the axis in degrees per second and is therefore useful to measure rotational movement.
The accelerometer measures the linear acceleration and therefore can be used to detect changes in position. To acquire linear acceleration, the system makes use of gravity and the unit is therefore mG (millig). The data can be transferred from mG to [m/s²] by multiplying it with 9.81/1000.
Brite
Similar to the PortaLite MKII, the Brite sensor includes a 6-axis IMU as well, which consist of an accelerometer and a gyroscope. The IMU ideally needs to be calibrated before starting a measurement, which can be done easily and fast done by following simple instructions in OxySoft. The device maintains its calibration status until it is powered off.

Figure 3: The exact configuration of the IMU and its axis in the Brite. This counts for all devices belonging to the Brite Family
IMU data and graphs can be shown in our software OxySoft and simultaneously measured with NIRS signals. Watch our video below to learn, how the IMU data can be displayed in our software OxySoft as a separate graph.
To date, there is no general way on how to remove motion artifacts using an IMU. However, to learn more about detection and proposed methods to estimate and remove motion artifacts, check out our suggested literature:
[1] Siddiquee MR, Marquez JS, Atri R. et al. Movement artefact removal from NIRS signal using multi-channel IMU data. BioMed Eng OnLine 17, 120 (2018)
[2] Scholkmann F, Spichtig S, Muehlemann T, Wolf M. How to detect and reduce movement artifacts in near-infrared imaging using moving standard deviation and spline interpolation. Physiol Meas. 31(5):649-62 (2010)
[3] Virtanen J, Noponen T, Kotilahti K, Virtanen J, Ilmoniemi RJ. Accelerometer-based method for correcting signal baseline changes caused by motion artifacts in medical near-infrared spectroscopy. J Biomed Opt. Aug;16(8):087005 (2011)


fMRI is widely used and seen as the gold standard in non-invasive in-vivo brain imaging. However, due to its technology, it is comes with certain limitations in participant groups and experiments. fNIRS is portable, easy to use and can be applied in subjects of all ages. Hence, it can provide a valid alternative to fMRI in many applications. In this blogpost we discuss advantages that fNIRS has over fMRI, considerations that should be kept in mind and we highlight literature using fNIRS and fMRI to compare, or get complementary information.